 手機版|
手機版|

 關注公眾號|
關注公眾號|


 下載手機APP
下載手機APP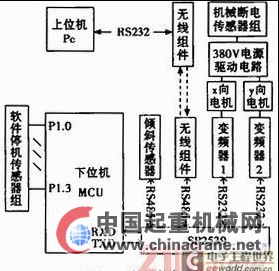
整個系統按照檢測、控制、通信、執行的順序劃分成四大塊,各部分的工作如下:
檢測部分:主要包括傾角和接近傳感器等硬件。其中前者用于獲得吊具的俯仰角和橫滾角并傳送給SP2539的子串口,為下位機判斷電機轉動方向,計算移動行程提供依據。后者分為軟件停機傳感器組和機械斷電傳感器組,采用雙重制動策略,保障吊具在使用過程中平穩調平和安全使用。
控制部分:單片機嵌入式系統是控制機構的核心部件,首先接收檢測部分的輸出值,包括吊具的實時姿態、軟件停機傳感器組狀態,同時調用子程序,處理輸入信號并給出動作信號給1、2號變頻器,使x,y向電機遵循指令進行動作。最后,單片機還需要和上位機設備進行交流,方便操作人員隨時掌握系統的狀態。
通信部分:這部分解決單片機分別與檢測機構、上位機以及執行機構的信息傳輸。具體的講,主要是指單片機與傾角和接近傳感器、上位機調平控制指令、1、2號變頻器輸出頻率、角度顯示以及SP2539串口擴展系統之間的信息傳輸。
執行部分:接收單片機的輸出信號,并按照上位機自動、手動調平指令調節1、2號變頻器輸出,從而驅動x、y向電機轉動方向,促使主吊點偏移完成調平工作。無線組件將上位機和下位機無縫連接,使得上位機的控制和數據獲取更加實時。



















